در سال هاي اخير، روش هاي جراحي اندوسکوپي با حداقل آسيب که تنها با ايجاد شکاف هاي کوچکي در بدن بيمار انجام ميشود، رشد بسيار چشمگيري داشته و در بسياري از موارد به طور کامل جايگزين جراحي باز شدهاست. استفاده از اين روشها، مزاياي متعددي نظير کاهش درد، خونريزي و دوره نقاهت را براي بيمار در پي دارد. اما در مقابل، محدوديتهاي متعددي را به جراح تحميل ميکند که از جمله ميتوان به عدم وجود ديد سه بعدي، درک مستقيم و حس لمسي از تعامل بافت و ابزار، معکوس و مقياس بودن حرکات جراح، قدرت مانور محدود و قرارگيري جراح به مدت طولاني در موقعيت عملکردي دشوار بر بالين بيمار (به دليل محدوديت هاي ناشي از به کارگيري ابزارهاي ميل هاي شکل و بلند) اشاره کرد.
استفاده از تکنولوژي هاي پيشرفته رباتيک نه تنها امکان رفع اغلب محدوديت هاي جراحي اندوسکوپي را فراهم ميکند، بلکه قابليت هاي جديدي را نيز در اختيار جراح قرار ميدهد. رباتهاي جراح اين امکان را ايجاد ميکند که جراح در حالت مناسب ارگونوميک در پشت کنسول جراحي، عمل جراحي را در موقعيت عملکردي بسيار راحتتر و با کيفيت بسيار بهتري انجام دهد. به علاوه، اين ربات ها با حذف لرزشها و حرکات زائد دست جراح و فراهم آوردن امکان مقياس گذاري حرکات به صورت مطلوب، انجام عمل هاي ظريف جراحي را امکان پذير مينمايد. همچنين با استفاده از اين ربات هاي جراحي ميتوان عملهاي دشوار جراحي را از راه دور نيز انجام داد که اين امر، امکان استفاده از خدمات درماني پيشرفته در مناطق محروم، دوردست و خطرناک را بدون نياز به حضور جراح، فراهم ميکند.
سابقه جراحي رباتيک در دنيا
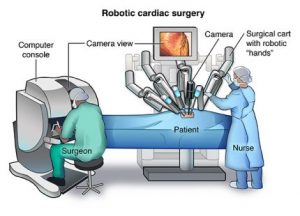
فناوري جراحي رباتيک يک فناوري نوپا و رو به رشد در عرصه تجهيزات پزشکي محسوب ميشود که هنوز دوران تکامل خود را طي ميکند. در نتيجه، عليرغم فعاليت هاي تحقيقاتي گسترده اي که به ويژه طي دو دهه اخير انجام شده است، محصولات محدودي به مرحله استفاده باليني رسيده اند. تنها سامانه رباتيک جراحي از راه دور که تاکنون تجاريسازي شده و به صورت عملياتي مورد استفاده قرار گرفته است، ربات داوينچي ساخت ايالات متحده آمريکا است. اين سيستم که هم اکنون در بسياري از اتاقهاي عمل پيشرفته دنيا در حال استفاده است، از مزايايي نظير افزايش دقت و کيفيت جراحي، قرار دادن جراح در موقعيت راحت کاري، ديد سه بعدي و انجام عمل جراحي از راه دور برخوردار است. با اين وجود، ربات داوينچي داراي معايبي است که از جمله آنها ميتوان به هزينه بسيار بالا و نيز عدم انتقال حس نيروهاي تعاملي بين ربات و بيمار به دستان جراح اشاره کرد؛ به گونهاي که جراح هيچ حسي از ميزان نيروهاي وارد بر بافت نداشته و فقط از طريق تصوير ميتواند به طور مثال ميزان سِفتي يک گره بخيه را تخمين بزند. با اين حال، طبق آمار منتشر شده توسط شرکت سازنده ربات داوينچي، تعداد واحدهاي نصب شده اين سيستم از ۸۹ واحد در سال ۲۰۰۲ به ۱۳۰۸ واحد در سال ۲۰۱۰ رسيده که ۱۹ واحد از آن در کشورهاي منطقه خاورميانه از قبيل عربستان، ترکيه، قطر و پاکستان نصب شده است. در همين راستا، شاخص سهام اين شرکت از سال ۲۰۰۲ ميلادي ظرف ده سال بيش از يکصد برابر رشد پيدا کرده است. طبق گزارشات، کاربرد ربات داوينچي در انجام عملهاي جراحي ظريف به سرعت رو به افزايش است؛ به طوري که آمار عمل رباتيک پروستاتکتومي (عملي که در آن تمام يا بخشي از غده پروستات برداشته ميشود) در کشور امريکا از ۳۰۰ مورد در سال ۲۰۰۱ به ۱۶۰۰۰ مورد در سال ۲۰۰۵ و به ۶۰۰۰۰ مورد در سال ۲۰۰۸ افزايش يافته است. در حال حاضر بيش از ۸۰% اعمال جراحي راديکال پروستاتکتومي در دنيا به روش رباتيک انجام ميپذيرد.
لذا با توجه به روند رو به رشد بازار از يکسو و از سويي ديگر هزينه بسيار بالاي ربات داوينچي (شامل هزينه اوليه بالغ بر دو ميليون دلار، تعمير و نگهداري سالانه يکصد هزار دلار و هزينه وسايل مصرفي هر عمل بالغ بر چهار هزار دلار)، ارائه محصولي با هزينه به مراتب کمتر و کارايي مشابه، فرصت بزرگي را براي دستيابي به بازارهاي جهاني و به خصوص منطقه، فراهم ميآورد.
سابقه جراحي رباتيک در ايران
به طور کلي تکنولوژي رباتيک با توجه به دانش، توانايي و تجارب موفق محققان کشور در اين عرصه و ارتباطات عميق و گسترده با دانشمندان و متخصصان برجسته ايراني مقيم خارج از کشور، يکي از زمينه هاي مستعد بروز خلاقيت و نوآوري در کشور محسوب ميشود. گروه هاي متعددي در دانشگاه ها و مراکز تحقيقاتي به تحقيق و پژوهش در اين زمينه اشتغال دارند. در اين ميان، حوزه جراحي رباتيک بر اساس مطالعهاي که در سال ۱۳۸۲ به منظور شناسايي زمينه هاي پژوهشي ارزشمند فناوري تجهيزات پزشکي به سفارش وزارت صنايع و معادن انجام شد، به عنوان يکي از حوزه هاي فناوري که از آينده درخشاني برخوردار است و فرصت هاي چشمگيري را براي توليد ثروت مبتني بر دانش و نفوذ در بازارهاي جهاني پيش روي کشور قرار ميدهد، معرفي شد. در طي سالهاي بعد از آن، پروژه هاي تحقيقاتي متعددي به منظور توسعه فناوري جراحي رباتيک در کشور انجام شد.
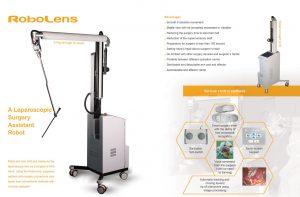
نخستين محصول جراحي رباتيک در کشور که به مرحله کاربرد کلينکي رسيد، ربات دستيار جراح در جراحيهاي لاپاروسکوپي به نام روبولنز بود که با حمايت سازمان گسترش و نوسازي در مرکز تحقيقات علوم و تکنولوژي پزشکي دانشگاه علوم پزشکي تهران و با همکاري گروه بيومکانيک دانشگاه صنعتي شريف طراحي و ساخته شد. اولين نمونه اين ربات در سال 1385 وارد اطاق عمل شد و طي دو سال در بيش از يکصد عمل جراحي لاپاروسکوپيک کوله سيستکتومي (برداشتن کيسه صفرا) در بيمارستان امام خميني تهران با موفقيت مورد استفاده قرار گرفت. نمونه هاي صنعتي اين محصول هم اکنون در سه بيمارستان کشور نصب شده و بيش از يک هزار عمل جراحي انساني را با موفقيت پشت سر گذاشته است. با توجه به اينکه تعداد انواع ربات هاي دستيار جراح در جهان که از قابليت استفاده در جراحي انساني برخوردارند، بسيار محدود است، اين ربات در کتاب ربات سرجري (Baik 2010) به عنوان يکي از معدود سامانههايي که توانسته است عملهاي جراحي انساني را با موفقيت پشت سر بگذارد، معرفي شده است.
پس از پروژه موفق ربات روبولنز، تيم مجري وارد عرصههاي پيشرفتهتري از فناوري جراحي رباتيک شد. نخست، طي پروژهاي که با حمايت سازمان گسترش و نوسازي در طي سالهاي ۱۳۸۷ تا ۱۳۹۰ انجام شد، طراحي و نمونهسازي آزمايشگاهي بازوها و ابزارهاي ويژه جراحي رباتيک با عنايت ويژه به نيازهاي جراحي ارگانهاي حجيم مورد توجه قرار گرفت. سپس در دي ماه سال ۱۳۹۰، تيم مجري بر اساس تجربيات به دست آمده، پروژه ساخت يک سامانه عملياتي جراحي رباتيک از راه دور با بازخورد نيرو را با حمايت مرکز همکاريهاي فناوري و نوآوري رياست جمهوري آغاز کرد که به نام پرآوازهي دانشمند بزرگ تاريخ کشورمان، «سينا» نام گذاري شد.
ربات جراحي سينا
سامانه جراحي رباتيک سينا شامل دو بخش اصلي کنسول جراحي از راه دور و رباتهاي جراح مستقر بر بالين بيمار است. ربات جراحي سينا داراي ۱۶ مفصل مجهز به موتور الکتريکي است که قادر است ظريفترين عملهاي جراحي را انجام دهد. کنسول جراحي شامل مانيتور، دو ربات راهبر و پدال هاي هدايت زيرپايي است که جراح با نشستن در پشت کنسول، تصاوير ارسال شده از ناحيه عمل را مشاهده و ابزارهاي جراحي و دوربين تصويربرداري را به صورت از راه دور هدايت ميکند. از سوي ديگر سه ربات پيرو شامل دو ربات حامل ابزار و يک ربات تصويربردار که در بالين بيمار مستقر شدهاند، اجراي دستورات جراح را بر عهده دارند. در طي عمل، ربات تصويربردار که به وسيله جراح کنترل ميشود، تصوير ناحيه عمل را در کنسول جراحي در اختيار جراح قرار ميدهد و حرکات دستان جراح توسط رباتهاي راهبر دريافت شده و با حذف لرزش ها و مقياس گذاري به ربات هاي پيرو انتقال مييابند تا با دقت بالا، در ناحيه عمل اجرا شوند. در عين حال نيروهاي تعاملي بين ابزار جراحي و بافتها توسط ربات هاي پيرو اندازه گيري شده و همزمان از طريق ربات هاي راهبر به دستان جراح بازخورد ميشوند تا از صدمه به بافت هاي مورد عمل جلوگيري شود. همچنين ربات تصويربردار ميتواند همانند چشم جراح، ابزار جراحي را تعقيب کند تا تهيه تصوير از ناحيه موردنظر به صورت رهگيري هوشمند امکانپذير شود. ارتباط بين ربات هاي پيرو بر بالين بيمار با ربات هاي راهبر در کنسول جراحي از طريق ساختارهاي مخابراتي از راه دور نظير شبکه اينترنت برقرار ميشود و لذا عمل جراحي ميتواند در دورترين نقاط کشور يا حتي بر روي يک ناو اقيانوس پيما صورت پذيرد.
سامانه جراحي رباتيک سينا پس از طي آزمون هاي فني و عملکردي، در تستهاي حيواني مورد ارزيابي قرار گرفت. از جمله عملهاي بسيار متداول که با استفاده از اين سامانه روي گوسفند زنده (در حالت بيهوشي کامل و در اتاق عملي مشابه اتاق عمل انساني) انجام شده است، عمل جراحي لاپاروسکوپيک کوله سيستکتومي يا همان برداشتن کيسه صفرا از طريق سه شکاف پنج ميلي متري روي شکم حيوان بوده است. به همين منظور يک اتاق عمل جراحي مدل با کليه امکانات در مرکز تحقيقات فناوريهاي بيومديکال و رباتيک طراحي و ساخته شد.
در عملهاي تست شده، حيوان از طريق ماشين بيهوشي زير نظر تيم دامپزشکي بيهوش شده و کل عمل از ابتدا تا انتها به صورت رباتيک و از راه دور انجام شده است. پس از جداسازي و خروج کيسه صفرا، رباتها از بالين حيوان کنار رفته و حيوان از حالت بيهوشي خارج شد. پس از پايان فرآيند عمل، حيوان بلافاصله و بدون هيچ مشکلي به مزرعه منتقل شده و به مدت سه ماه در مزرعه نگهداري و رشد يافته است. طبق نظر تيم دامپزشکي، در اين مدت حيوان هيچ عارضهي خاصي نداشته و بدون مشکل به زندگي خود در مزرعه ادامه داده است. پس از سه ماه به منظور بررسي محل عمل و روند بهبود، حيوان ذبح شده و محل عمل توسط جراح مورد ارزيابي قرار گرفت و طبق نظر جراح، عمل کاملاً موفقيت آميز گزارش شده است. محل جراحي را سه ماه پس از عمل به ترتيب از بالا به پايين: روي پوست، زير پوست و در محل قرارگيري کيسه صفرا روي کبد حيوان نشان ميدهد. از آنجا که عمل با عبور ابزارهاي ۵ ميلي متري انجام شده، هيچ ضايعهاي روي پوست حيوان نداشته و محل جدا شدن کيسه صفرا از روي کبد نيز بسيار تميز و عاري از هر عارضهاي گزارش شده است.
اين سامانه هم اکنون به صورت يک سامانه جراحي کاملاً عملياتي با قابليت تست حيواني و انجام کليه اعمال جراحي لاپاروسکوپي ارائه شده و تستهاي حيواني را با موفقيت پشت سر گذاشته است.

مزيتهاي رقابتي ربات جراحي سينا
سامانه جراحي رباتيک سينا از يک طراحي منحصر به فرد ملي و مبتني بر نيازها و ملاحظات بومي برخوردار است که سبب ميشود در مقايسه با تنها ربات جراحي تجاري دنيا
(ربات داوينچي)، از مزيت هاي نسبي متعددي براي کاربردهاي باليني برخوردار باشد. يکي از مهمترين ويژگيهاي ربات جراح سينا، استفاده از ابزارهاي متداول جراحي لاپاروسکوپي به جاي به کارگيري ابزارهاي خاص است که کاهش شديد هزينههاي مصرفي ربات را در طي عمل جراحي به دنبال دارد. به طوري که هزينه متوسط مصرفي ربات سينا در صورت استفاده از ابزارهاي دائم مصرف، بسيار ناچيز و در مقايسه با هزينه متوسط ربات داوينچي (حدود ۴۰۰۰ دلار) به مراتب کمتر است.
مزيت ديگر ربات سينا در مقايسه با ربات داوينچي، اندازه گيري نيروهاي تعاملي بين بافت و ابزار و انتقال آن از طريق رباتهاي راهبر به دست جراح است که سبب ايجاد حس لامسه مصنوعي براي جراح ميشود. برخورداري از حس لامسه از راه دور امکان ميدهد که جراح نيروهاي وارده بر بافت هاي ناحيه عمل را به دقت کنترل کند و در نتيجه از بروز صدمه و جراحت به بافتها در اثر بارگذاري بيش از حد جلوگيري شود.
سرانجام ربات جراحي سينا به دليل بهره گيري از فناوري هاي ملي، از قيمت به مراتب کمتري نسبت به ربات داوينچي برخوردار است که اين امر، امکان بهره وري وسيع بيمارستان ها از آن را به خصوص در کشورهاي در حال توسعه فراهم ميکند. قيمت پيش بيني شده ربات سينا با مشخصات استاندارد باليني در مرحله توليد صنعتي کمتر از يک سوم قيمت ربات داوينچي است. به همين ترتيب هزينه هاي تعمير و نگهداري ربات سينا بسيار کمتر از ربات داوينچي است و طراحي آن به گونهاي است که هيچ قطعه استهلاکي و نيازمند تعويض مداوم در آن استفاده نشده است.
شايان ذکر است که ربات جراحي داوينچي از جمله فناوريهاي استراتژيک دولت آمريکا محسوب ميشود که سالهاست از ورود آن به کشور عزيزمان جلوگيري شده و به لطف خدا و تلاش متخصصان ايراني، اين فناوري هم اکنون با مزاياي رقابتي قابل توجه در کشور ساخته شده و اُميد است در خدمت ارتقاء خدمات درماني جامعه قرار گيرد.
سامانه جراحی رباتیک سینا شامل دو بخش اصلی کنسول جراحی از راه دور و رباتهای جراح مستقر بر بالین بیمار است. کنسول جراحی شامل مانیتور، دو ربات راهبر و پدالهای هدایت زیرپایی است که جراح با نشستن در پشت آن، تصاویر ارسال شده از ناحیه عمل را مشاهده و ابزارهای جراحی و دوربین تصویربرداری را از راه دور هدایت میکند.

معرفی، کاربرد و عملکرد:
ربات دستیار جراح در جراحی لاپاروسکوپی (روبولنز مدل استند اِلون) یک سامانه جراحی رباتیک است که به عنوان دست سوم جراح در روش جراحی لاپاروسکوپی وظیفه حمل و نگهداری دوربین لاپاروسکوپی و تصویربرداری حین جراحی لاپاروسکوپی را برعهده میگیرد. در روشهای معمول جراحی لاپاروسکوپی، یک فرد دستیار جراح این وظیفه را بر عهده دارد.
وجود فاکتورهای انسانی از جمله خستگی فرد نگهدارنده دوربین و احتمال اشتباه وی در تهیه تصویر از موضع جراحی به عنوان یکی از عوامل اصلی جایگزینی وی با یک بازوی رباتیکی مطرح شده است. این بازو در کنترل مستقیم خود جراح قرار داشته و فرامین حرکاتی را از حرکات پا یا دستان جراح دریافت میکند. همچنین امکان صحبت جراح با ربات و کنترل ربات از طریق فرامین صوتی میسر شده است. علاوه بر این، سامانه مذکور قابلیت رهگیری ابزار جراحی با استفاده از پردازش تصاویر دریافتی را نیز در اختیار داشته و می تواند بدون نیاز به فرمان جراح، به هر سمتی که ابزار جراحی حرکت می کند، حرکت نموده و همواره به گونه ای تصویر بگیرد که ابزار جراحی در وسط تصویر موضع عمل قرار گیرد.
این ربات در دو مدل بِدساید و استنداِلون طراحی و ساخته شده است. مدل استند اِلون، مدلی است که مستقلا روی ارابه و چرخ های متعلق به خود دستگاه نصب شده و کاملا پرتابل میتواند بین اطاق عملهای مختلف حرکت نموده و در عملهای جراحی لاپاروسکوپی مشارکت نماید.